micropp
GPipe
What is GPipe?
- GPipe splits large minibatches into smaller “microbatches”, and process them through model partitions (stages) running on different devices (GPUs).

How does it work?
- Split the Minibatch: Each input minibatch of size
Bis split intomequal microbatches (B/msamples per microbatch). - Pipelined Execution: Process microbatches in order. A microbatch flows forward through stage 0, then stage 1, …, until the last stage. Once a stage finishes one microbatch, it immediately starts the next.
Gradient Accumulation
- Each microbatch is trained and its gradients computed independently. Gradients from all microbatches are accumulated locally before the optimizer update—giving the same effect as if training on the full batch at once.
Limitations & Details
1. Pipeline Bubbles:
- The “fill” and “drain” phases of the pipeline (when not all devices are occupied) create idle slots or “bubbles”.
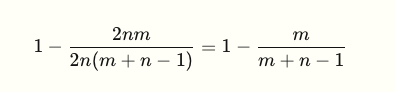
- The fraction of time lost to bubbles:
- Increasing the number of microbatches m (flooding the pipe), is necessary for making the bubble fraction small.
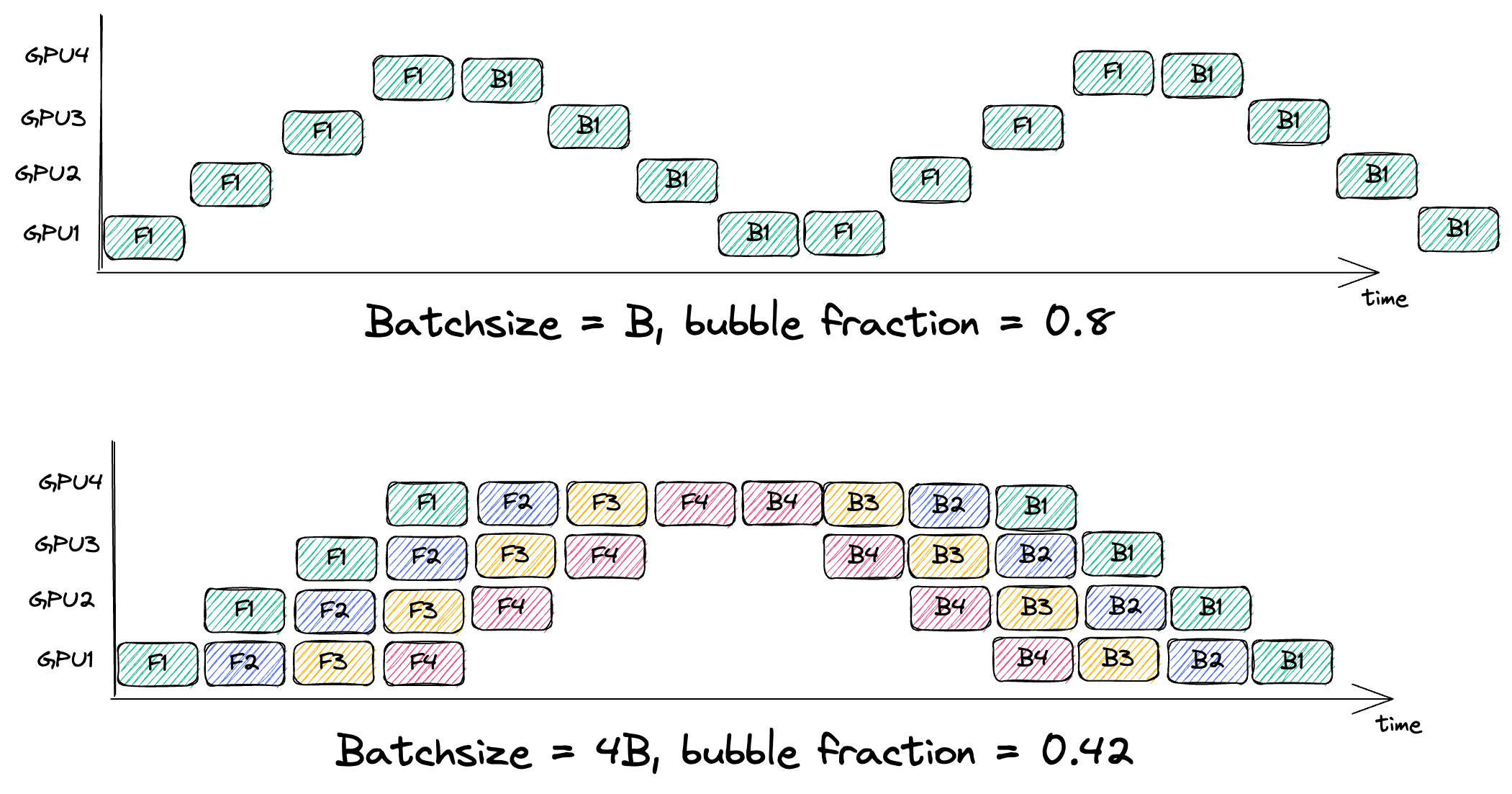
- Top plot is 0.75 not 0.8!
2. Memory Demand:
- Each microbatch requires storing its activations until its backward pass is finished; using more microbatches increases parallelism at the cost of memory consumption.
-
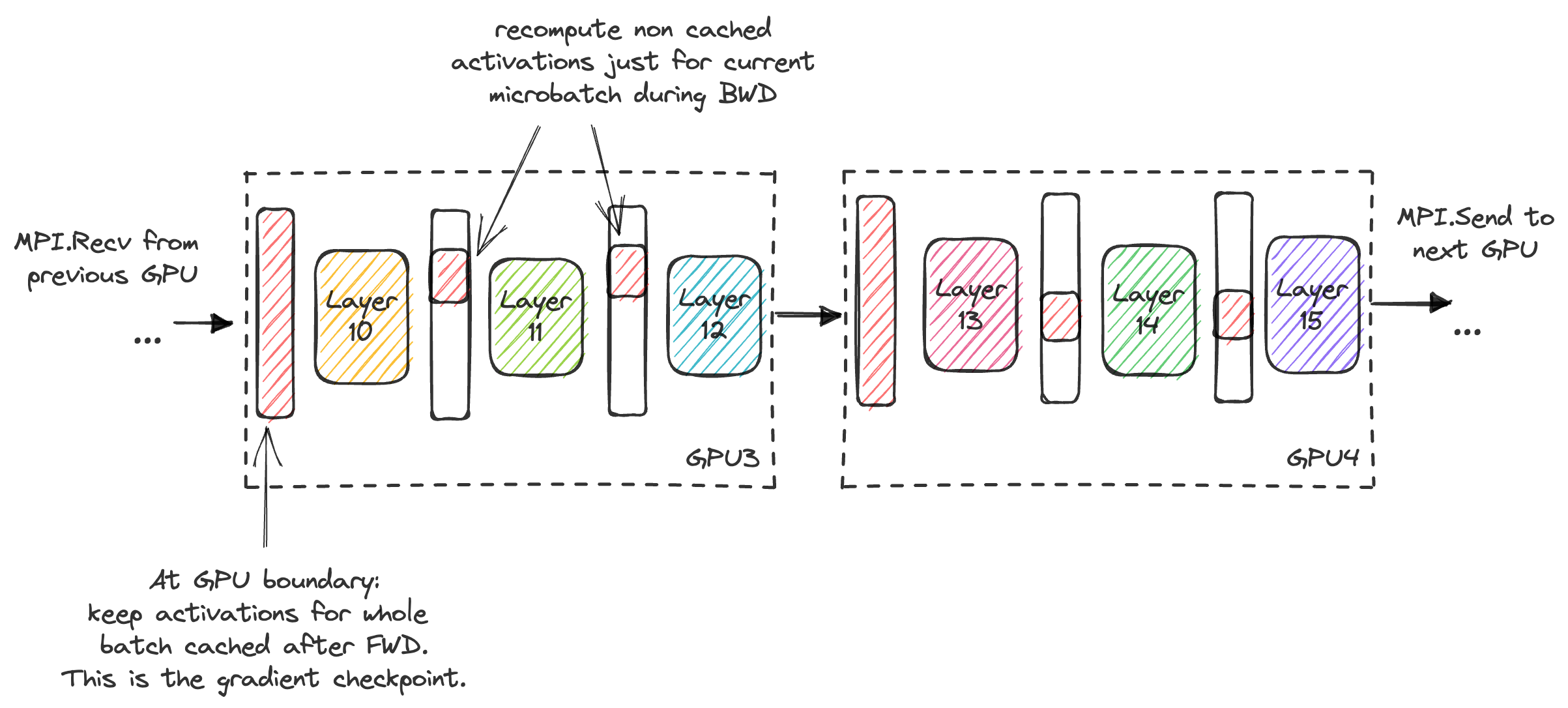
In GPipe, we need to cache the activations for each microbatch from the time it was forward‘ed until the corresponding backward.
- Gradient checkpointing can be used to trade extra computation for reduced activation memory: instead of storing all intermediate activations, some are recomputed during backward.
3. BatchNorm:
- Standard BatchNorm layers (which compute stats over the full minibatch) break the microbatch independence assumption.
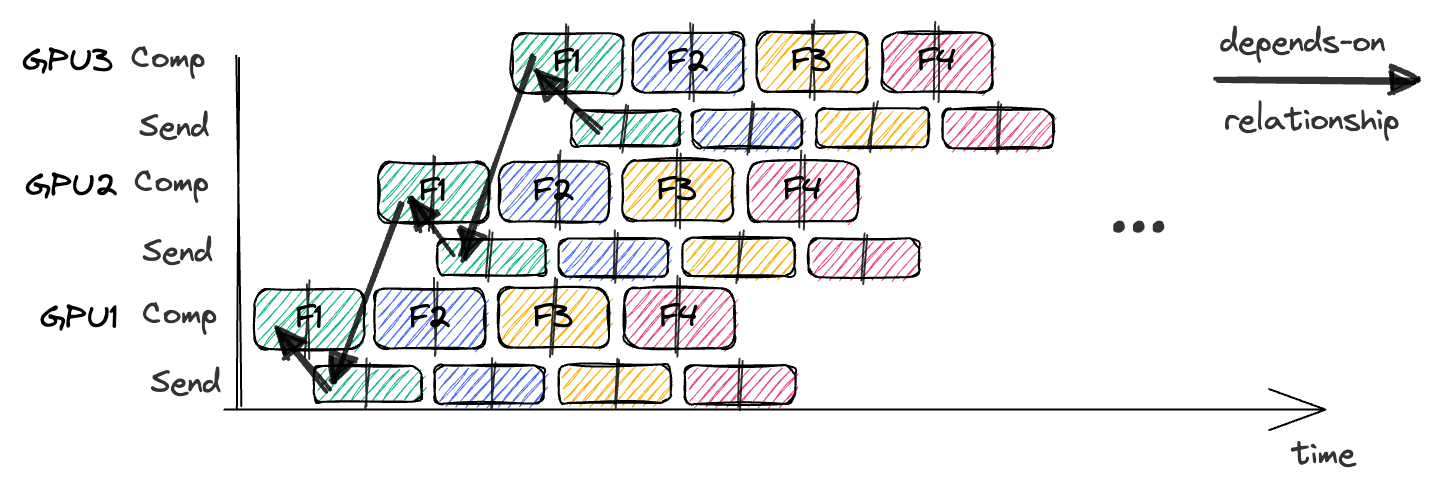
4. Communication-Compute Overlap:
- Classic GPipe does not really overlap communication (transfers between GPUs) with compute, because each stage must finish its chunk before passing it!